First Person View (FPV) RC Car
I wanted to make a FPV RC car only with the parts I had on hand, so I aimed to design and make an RC car that could drive around my house and be able to transmit FPV video to an FPV headset. After modeling all of the components in Fusion, I was able to lay them out and plan the assembly. The final car had a 12:1 gear system to increase the torque at the wheel and the car was able to drive around the house easily with 30 minutes of battery.
Design
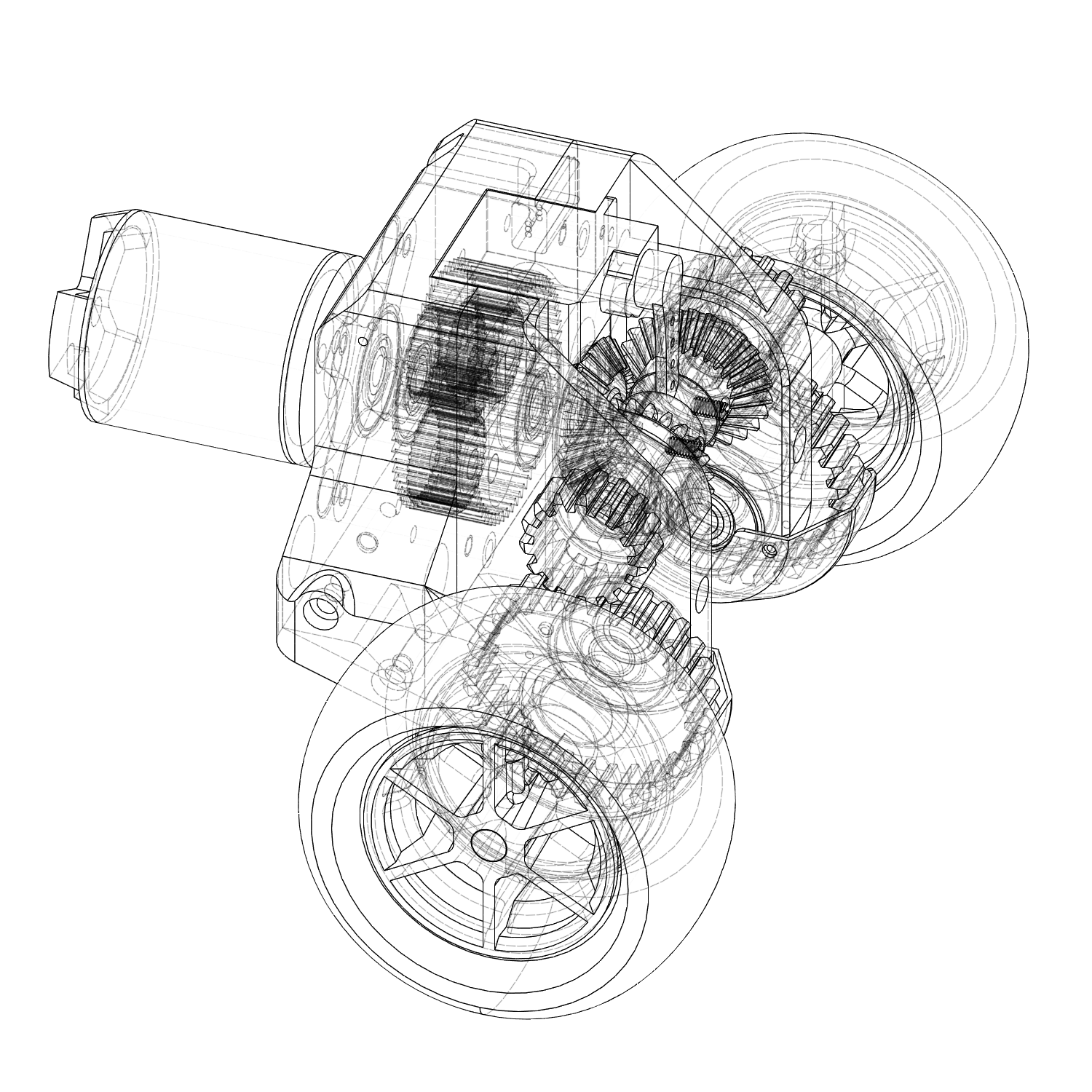
I used a 11.1 V 900 kV motor for the main drive and reduced to a 12:1 gearing to produce ample torque at the wheel. The first reducing stage is a 6:1 planetary set and the second stage is a simple 2:1 pinion reduction.
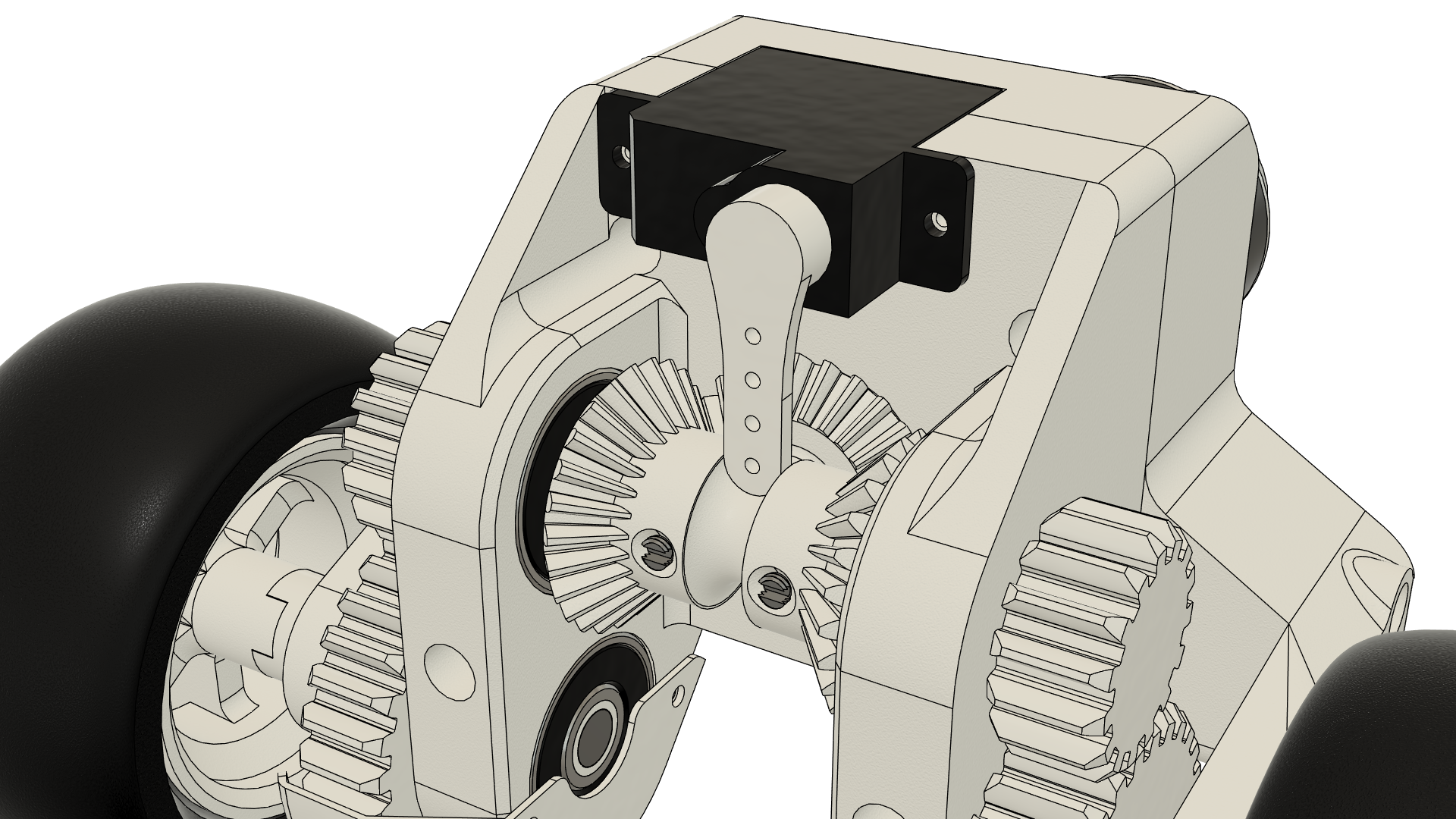
I made it a requirement that the car was capable of being reversed, but I did not have a reversable speed control, so I employed a reversable gearing mechanism using a single servo. The double bevel gear is free to slide along the shaft, but it cannot spin about the shaft.
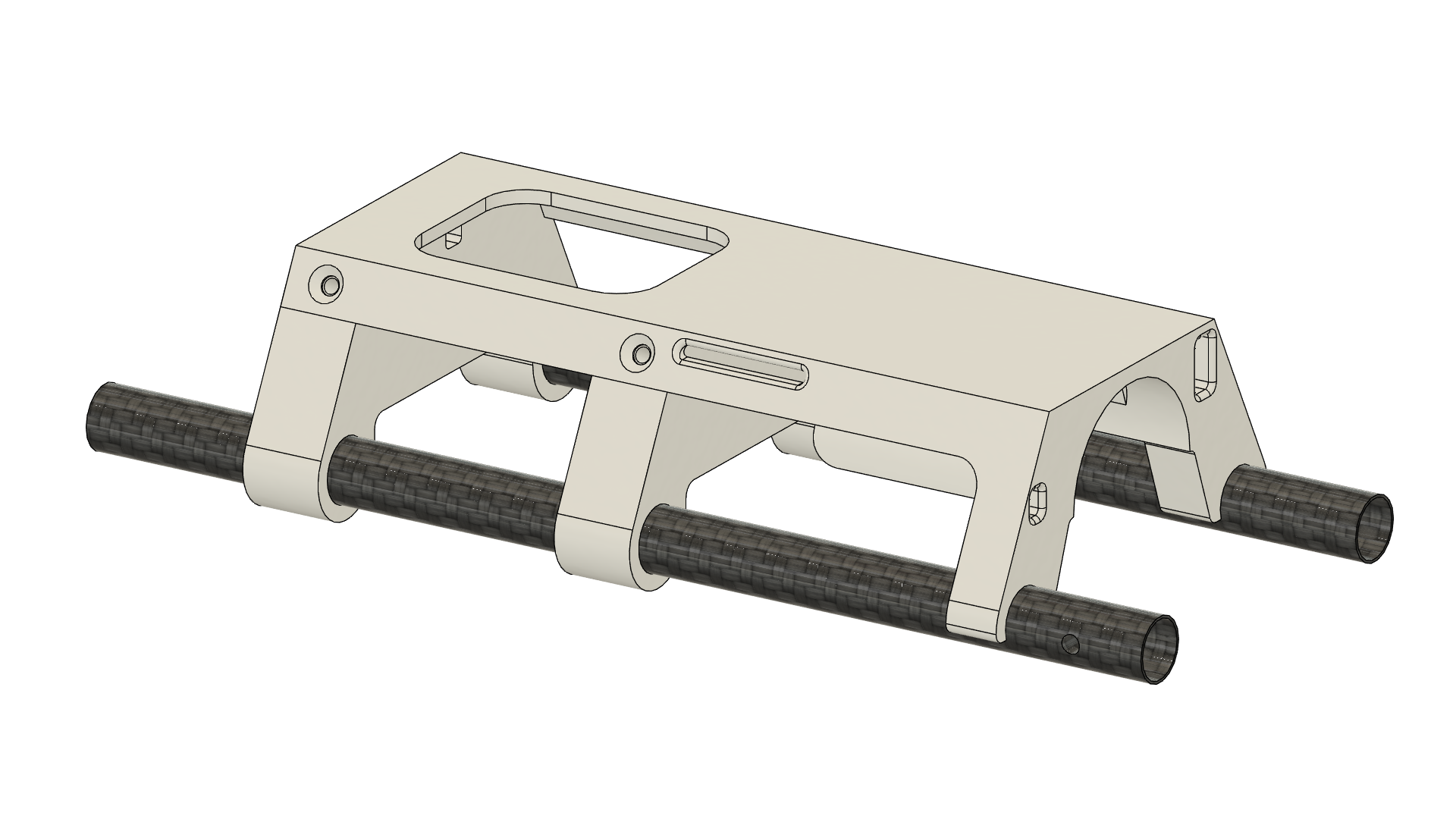
The frame is a simple and light weight combination of carbon fiber tubes and 3D printed parts. The frame rigidly connects the power and gearing system and the steering system while also supporting most of the electronics.
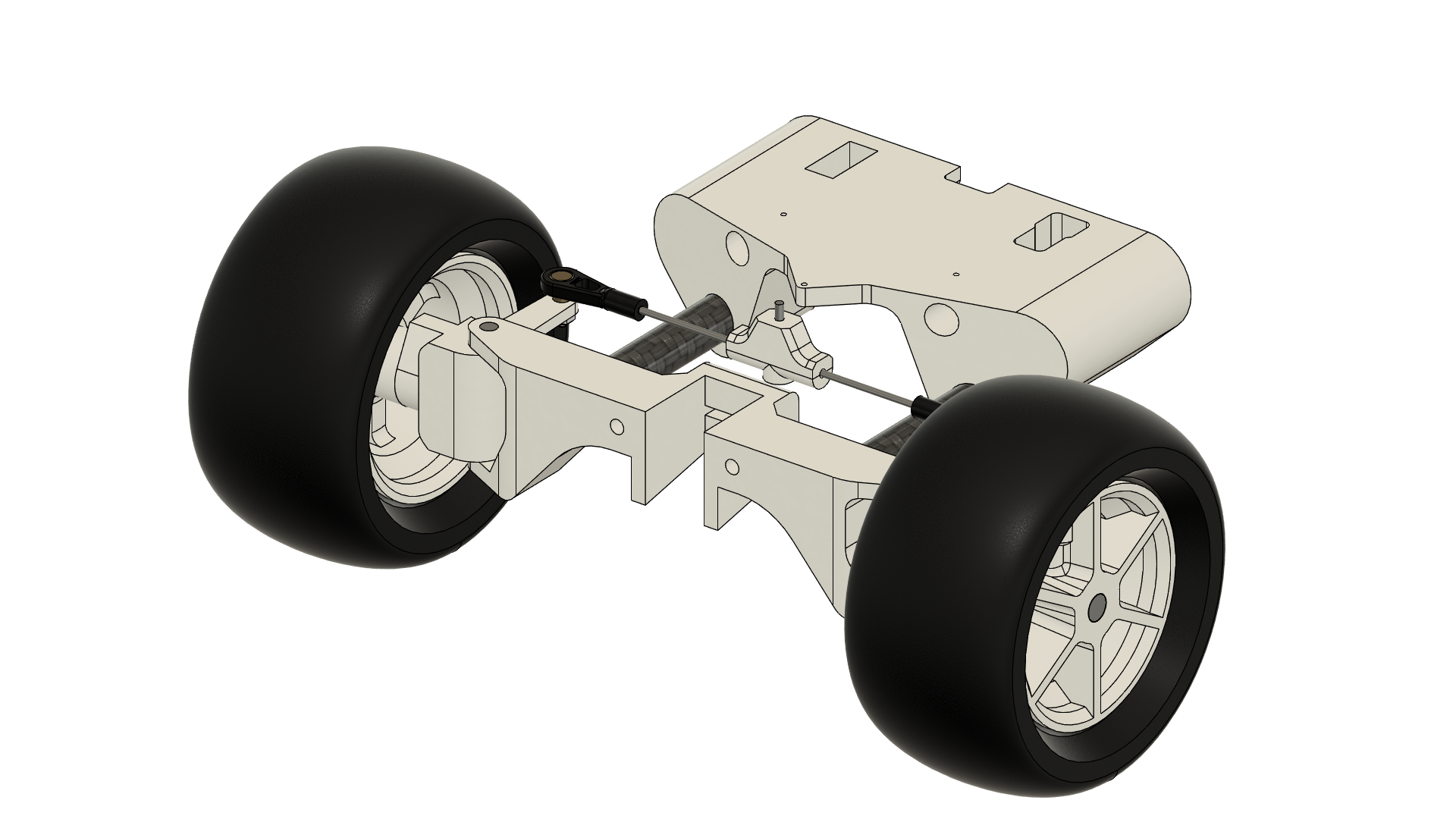
The steering system is a simple and robust mechanism that is controlled by a single servo. It also serves as the mount for the FPV camera, main and auxiliary power plugs.
Testing
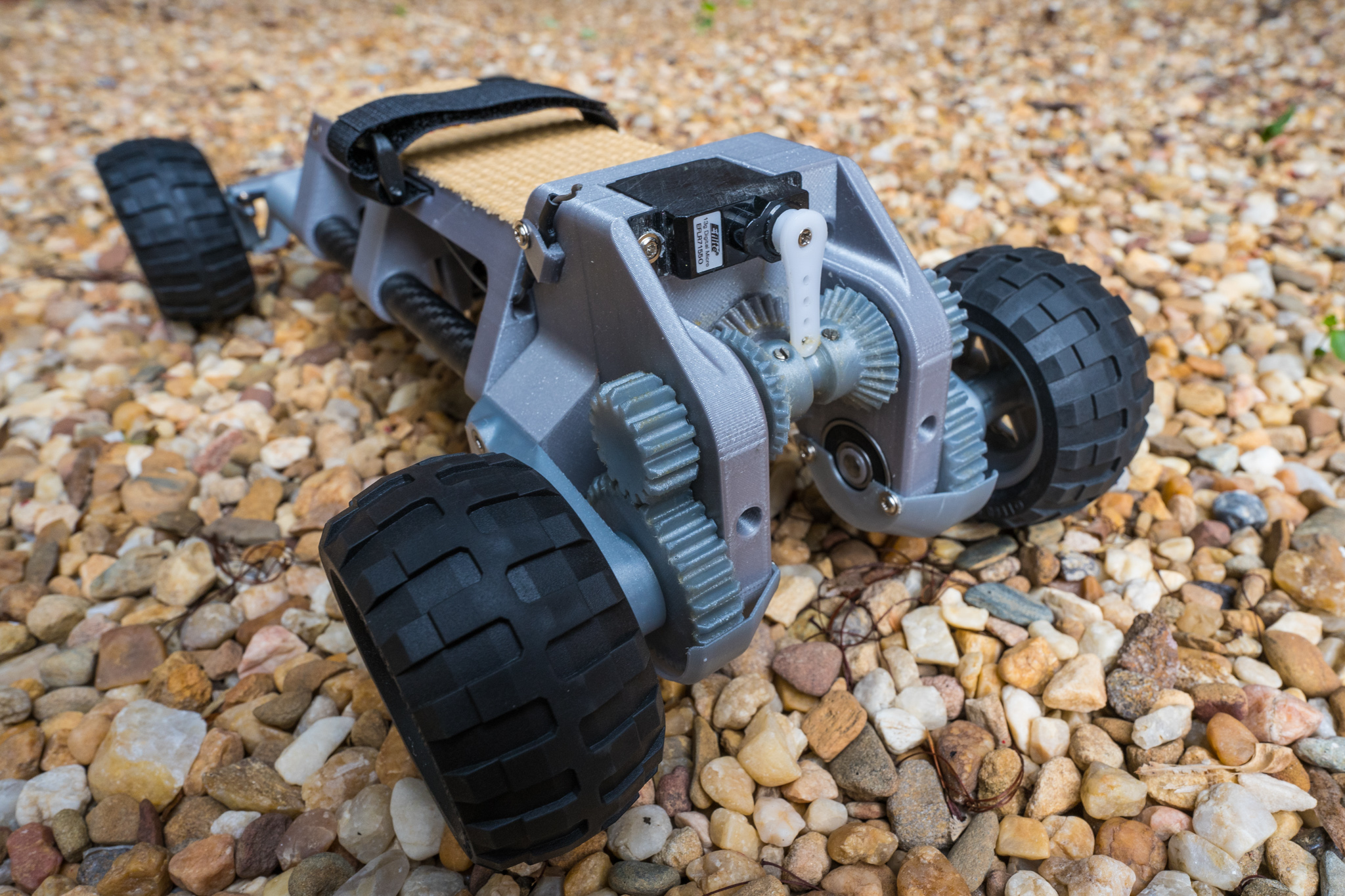
Final Product

The final 3D printed product. It turned out to be an incredibly robust little machine that has great handling. These images were taken before I added a front bumper.
Fun fact: the tires are made by LEGO